1. 系统构成与运行逻辑
1.1 核心硬件的结构设计
系统以跨越测流断面的双轨导轨为基础,两根间距 300mm、直径不小于 5mm 的 304 不锈钢钢丝绳平行架设,既作为探测载体的运行轨道,又为整个系统提供稳定的结构支撑。探测载体(雷达运行车)采用悬挂式设计,内部集成雷达流速探头、驱动电机、蓄电池及无线传输模块,通过驱动轮与转向轮悬挂于导轨之上。工程技术人员在设计中特别优化了轮组与绳体的贴合度,确保载体在风雨等复杂气象条件下不发生偏移。
1.2 控制中枢的指令流转
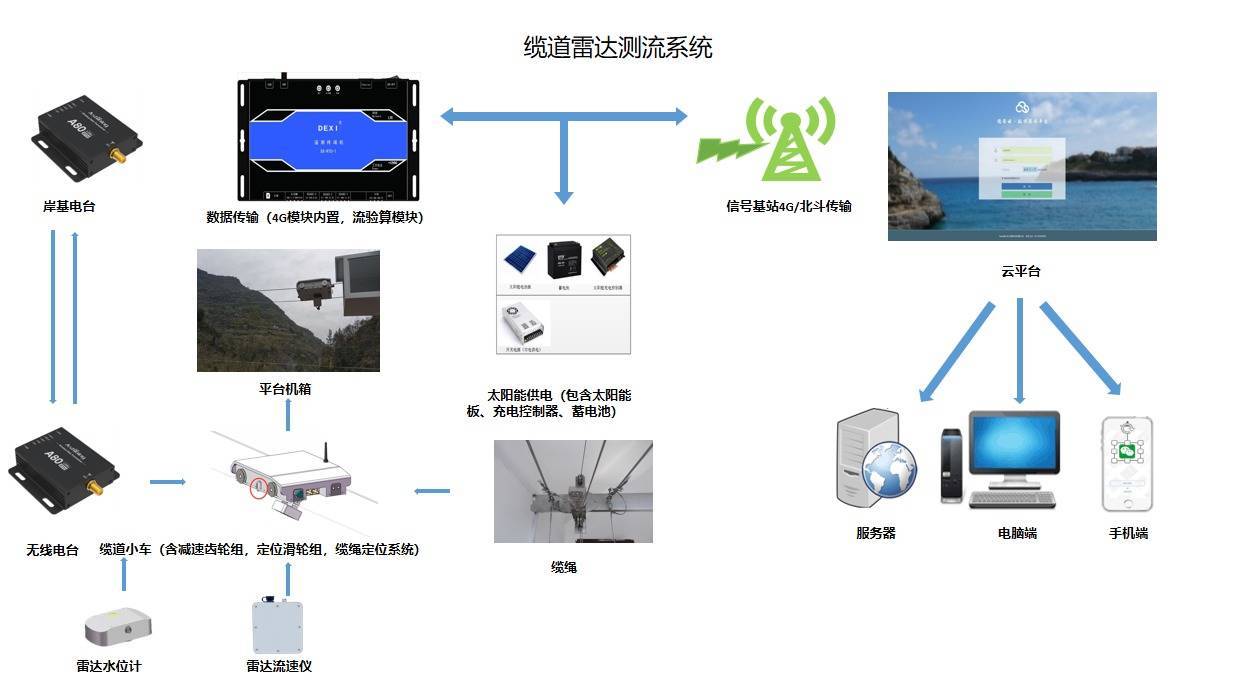
控制中枢作为系统的核心,承担指令分发与数据整合功能。测流任务启动时,控制中枢通过无线电台向探测载体发送定位指令,驱动其沿导轨移动至预设测流垂线位置;载体抵达后反馈到位信号,控制中枢随即下达测速指令。雷达流速探头启动后对水体表面流速进行实时测量,数据经无线传输模块回传至控制中枢,同时水位信息被同步采集,这些数据实时传输至流量计算终端,结合断面参数生成流量结果,整个过程无需人工干预。
1.3 能源供给的保障机制
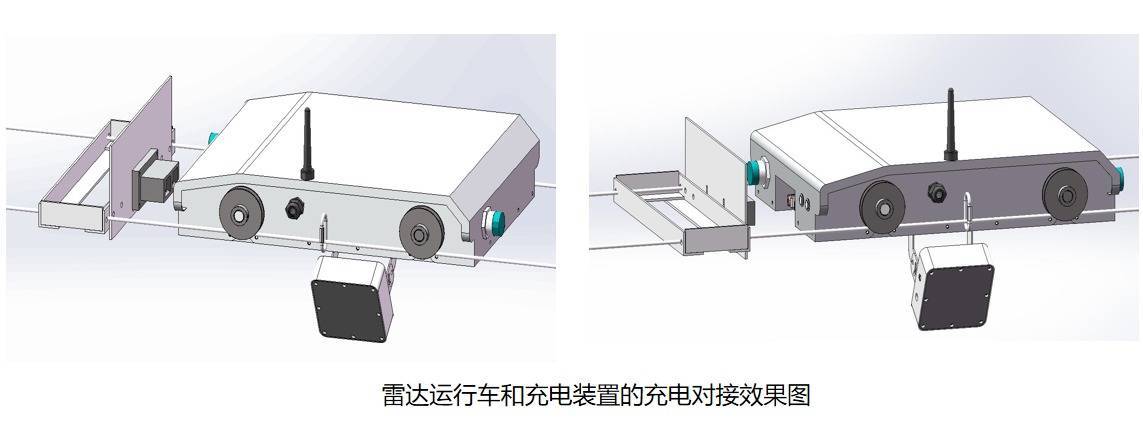
系统采用太阳能与蓄电池组合供电模式,蓄电池容量需满足连续 45 天阴雨天正常运行,配套太阳能板则需在 2 个晴天内完成电池充满。自动充电装置设置在载体停靠位,测流任务完成后,载体返回时通过双交叉式结构实现充电对接,智能充放电模块实时调控充电电流与电压,避免过充或欠充对电池寿命造成影响。工程师通过反复测试确定充电阈值,使电池循环使用寿命延长 30% 以上。

2. 技术特性与创新设计
2.1 多场景适配的测流模式
系统具备多样化测流调控能力,可根据水文条件自动切换运行模式。定时测流模式按预设时间启动监测,适用于常规水文数据采集;水位变幅超过 ±0.5m 时,加密测流模式自动触发,确保洪峰、枯水等关键节点数据不缺失;低水位或环境温度低于设定值时,停测保护机制启动,避免设备在极端条件下运行受损。这些模式通过程序预设嵌入控制模块,研究人员经长期现场验证,确定模式切换的阈值参数,使其更贴合实际水文规律。
2.2 探测载体的环境适应性优化
探测载体外壳采用小风阻流线型设计,配合 4 轮驱动系统,可在风雨天气保持稳定运行。研究人员通过计算载体重量与轮组摩擦力的平衡关系,解决冰雪天气可能出现的打滑问题;载体启动与停止时自动加减速,避免剧烈晃动对测速精度的影响。检测到电池电压过低、测速异常等故障时,载体可自主返回停靠位并上报故障信息,这种自诊断功能使系统维护效率提升 40% 以上。
2.3 数据处理的完整性保障
数据传输与处理环节注重时效性与规范性。控制中枢配备高性能遥测终端,支持多接口扩展与大容量存储,可实时接收、存储流速、水位及设备状态数据,并按水文通讯规约格式化后上传至中心服务器。云数据平台对各站点数据集中展示,提供实时监控、历史查询与曲线分析功能,数据可直接用于水文资料整编,同时为水资源调度决策提供动态参考。工程师在软件设计中优化数据加密算法,确保传输过程中信息不被篡改。
3. 误差控制与应用规范
3.1 雷达测流的误差影响因素
雷达波测流精度受多重因素制约,研究人员实验发现,传感器俯仰角与水平角的设置偏差会导致流速换算误差,安装时需用专业仪器校准角度参数;探测载体晃动使测点位置变化,导致流速数据离散性增加,此时需延长单次测流历时以平衡误差;风速对水面流速的干扰在低流速场景中尤为明显,实测流速低于 0.3m/s 时,需结合气象数据对结果进行修正。
3.2 系统安装的技术要求
导轨架设需满足严格参数标准:钢丝绳间距精确控制在 300mm,空载垂度不超过 100mm;跨度超过 100 米的河道选用直径不小于 5mm 的钢丝绳,通过配重块平衡张力,避免绳体因热胀冷缩产生过度形变。雷达探头与水面的距离控制在 0.5m 至 30m 之间,既保证最低水位时的测量覆盖,又避免最高水位时设备接触水体;防雷接地装置的接地电阻小于 10 欧,防止雷电对电子元件造成损坏。
3.3 不同场景的应用适配
系统在 200 米及以下河宽的河道中表现稳定,双轨设计相比单轨在运行稳定性、测速精度及设备保护方面更具优势,尤其适用于多泥沙、宽浅型河道。维护人员需定期检查导轨连接件紧固性、充电装置接触状态及电池性能,雷雨多发区域增设浪涌保护器;流量计算采用流速面积法,通过率定表面流速系数将雷达测量值转换为实际流量,率定时对比传统流速仪或 ADCP 的实测结果,确保系数取值准确。

全自动水文缆道测流系统通过技术整合,推动传统水文测验从人工操作迈向智能化。无人值守模式降低野外作业强度,多场景适应能力拓展监测覆盖范围,精准数据支撑为水资源管理提供可靠依据。随着算法优化与硬件升级,该系统在生态流量监测、流域综合治理中的应用价值将进一步凸显。
科元网提示:文章来自网络,不代表本站观点。